自适应控制
目前,根据有关资料我们写出了输出 \(K_p\)、\(K_i\) 和 \(K_d\) 3个参数的神经网络。推导公式中有一个项目 \(\frac{dy}{du}\) 为表征系统特性的量,它不是一个时不变常量。在实现时,我们采用符号函数估计的方式替代了这一个部分,形成了所有参与运算的部分均已知的梯度更新公式。这种办法的理论不完备之处在于对 \(\frac{dy}{du}\) 的估计,这个时变量实际可能会形成复杂的函数,在一些情况下可能无法简单地使用符号函数来近似。
在近期阅读的论文1中,注意到了之前没了解过的自适应控制2思路。论文的基本策略是通过 RBF 网络对被控对象进行在线的学习和辨识得到 \(\frac{dy}{du}\)。
原理
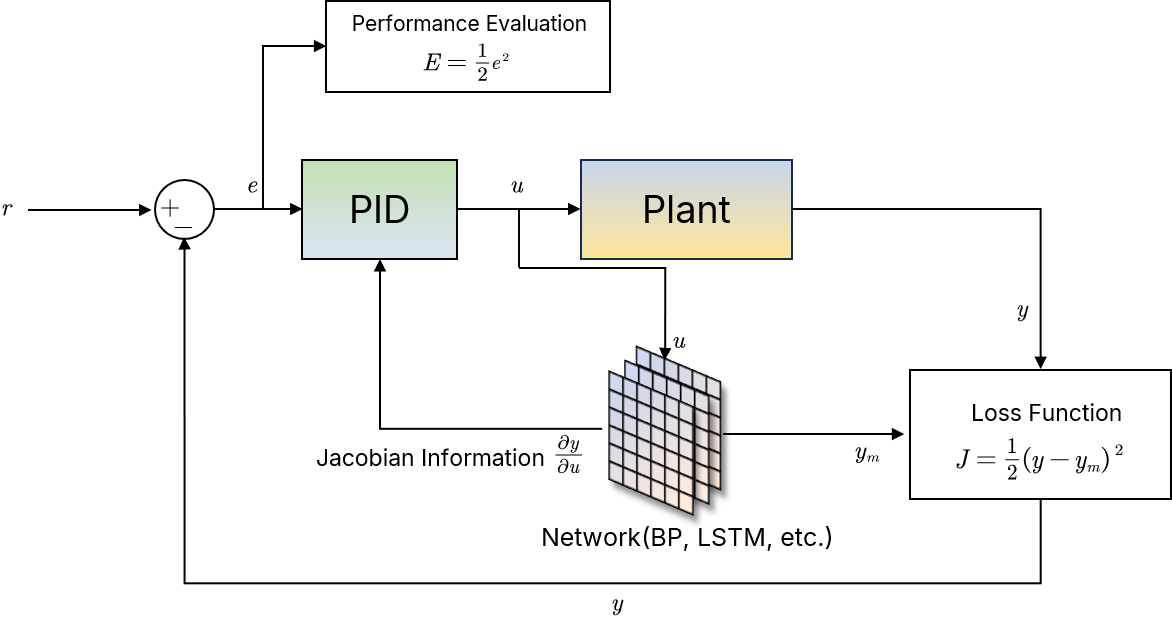
按照论文,做出的系统结构图如下,其中网络部分理论上可以以较小的成本换成任意 PyTorch 提供的现成函数或在此基础上构造的复合网络:
径向基网络是由径向基函数(Radical Basis Function,RBF)构成的,典型包含3层,第一层输入层,第二层隐藏层,第三层输出层。输入层到隐藏层会经过一个径向基函数(高斯核函数)实现非线性变换计算隐藏层输出:
\[
\begin{align}
h_j=exp(-\frac{||X-C_j||^2}{2b_j^2})
\end{align}
\]
上述过程中包含2个参数,一是每一个隐藏层神经元存储的“中心向量” \(C\),第 \(j\space (1\le j \le m) \) 个隐藏层神经元对输入 \(X\) 的每一个分量 \(x_i\space (1\le i \le n) \) 都存在一个中心值 \(c_{ij}\)。另一个是被一个隐藏层神经元存储的直径 \(b_j\)。
隐藏层到输出层的映射则是线性的,第 \(k\) 个时间步的神经网络输出是:
\[ \begin{align} y_m(k)=w_0+w_1h_1+w_2h_2+\dots+w_mh_m=\sum_{j=1}^{m}w_jh_j + w_0 \end{align} \]
\(w_0\) 是文中指定的超参数。上述网络可训练的参数包括隐藏层核函数的 \(C_j\) 和 \(b_j\) 以及输出层的权重 \(W\)。因为网络计算结构已知,所以可以通过手动推算的方式得到更新公式。
\(y_m\) 对应的是被控对象的输出,如上图所示文中使用的 Loss Function 用于评估神经网络辨识结果与被控对象输出的近似程度,随着训练的进行 loss 越小意味着网络对系统的辨识越准确,这样就有 \(\frac{dy}{du}\) 的估计公式
\[ \frac{\partial{y(k)}}{\partial{u(k)}}\approx\frac{\partial{y_m(k)}}{\partial{u(k)}} \]
随后定义针对控制器表现的评估函数 \(E=\frac{1}{2}(r-y)^2=\frac{1}{2}e^2\) ,这和目前我们做的工作的理论是一致的——在我们目前的理论中,更新 PID 参数依靠的就是函数 \(E\),需要解决 \(\frac{\partial{E}}{\partial{K_p}}\) 链式求导中出现的未知量 \(\frac{dy}{du}\),因为 \(K_p\) 等 PID 参数就是神经网络给出的,随即可以进一步得到 \(E\) 对神经网络参数的梯度,因为 \(E\) 与神经网络输出不存在直接的关系,因此在得到 \(E\) 对神经网络参数的梯度后必须手动对网络参数进行更新,是非常麻烦的。
而我注意到,在本文提出的策略中,用于评估神经网络表现的损失函数 \(J=\frac{1}{2}(y-y_m)^2\) 直接就是神经网络输出 \(y_m\) 的函数,因此从 PyTorch 角度看,张量计算图没有被破坏,可以利用 PyTorch 的自动梯度计算功能。 这也是之前说的可能会省事的理由,因为我们只要实现这样一个网络,就可以利用 PyTorch 自己的机制去更新网络权重,不需要手写网络参数更新逻辑。
而 PID 自己的参数更新还是按照链式法则来进行,以更新 \(K_p\) 为例,必要数据 \(\frac{\partial{E}}{\partial{K_p}}\) 的计算方式为:
\[ \frac{\partial{E}}{\partial{K_p}}=\frac{\partial{E}}{\partial{y}}\frac{\partial{y}}{\partial{u}}\frac{\partial{u}}{\partial{K_p}} \]
最后一个参数 \(\frac{\partial{u}}{\partial{K_p}}\) 就是 PID 控制器的比例因子。上述公式中3个量都是已知的,有了上述的结果后,\(K_p\) 的更新就是:
\[ \Delta K_p=-\eta\frac{\partial{E}}{\partial{K_p}} \]
其中 \(\eta\) 是变化率。
总结
上述方法的最大好处是,神经网络的部分不用手写参数更新逻辑了,正确性可以得到较好的保证。
此外,通过和目前的思路比较,也会发现:原先的思路到了 \(\frac{\partial{E}}{\partial{K_p}}\) 其实和这篇论文中提出的想法几乎完全一致(梯度下降的方法本身就是一种符合数学逻辑的、合理的参数更新方式),但是我们的思路因为将神经网络直接摆到了给出 PID 参数的位置上,PID 控制器的控制效果评价函数和神经网络的损失函数都依赖 \(E\),那么就要在不存在 PyTorch 计算图关系的情况下利用 \(E\) 来更新网络权重了。而即便神经网络不给 PID 参数,利用梯度下降的规律我们也可以知道,一旦计算得到 \(\frac{\partial{E}}{\partial{K_p}}\) 等参数,我们也可以利用数学原理去手写 PID 参数的更新逻辑,而神经网络得到了 \(\frac{\partial{y}}{\partial{u}}\) 的可靠估计值, PID 参数相关的从 \(E\) 开始的梯度链的可靠性也会比单纯符号函数的估计要好。
当然,可能也可以用两个神经网络,一个神经网络负责辨识,一个神经网络用于给出PID参数,不过这个工作量相对会比较大,加上现在给出PID参数的神经网络的搜索能力还存在一些问题,所以我觉得目前这只能算是后面的可行方向之一。
-
Zhang, Ming-guang, Xing-gui Wang, and Man-qiang Liu. "Adaptive PID control based on RBF neural network identification." 17th IEEE International Conference on Tools with Artificial Intelligence (ICTAI'05). IEEE, 2005. (link) ↩
-
自适应控制(Adaptive Control)是一种控制策略,用于自动调整控制器的参数以适应系统动态的变化,特别适用于被控对象特性不确定或随时间变化的情况。 ↩